| |
|
||||||
|
|
|||||||
|
I/O SystemsThis plug-in addresses discrete event systems that satisfy a variation of Willems' conditions on I/O behaviours [B1]. In the context of system interconnection, the conditions imply a structural non-blocking property. In particular, one may design a controller for a plant abstraction and run it on the actual plant, without risking a blocking situation. This enables the use of discrete event systems synthesis methods to solve control problems for plants with an infinite state space, provided that a finite abstraction is available; see e.g. [B2] for a discussion of hybrid control systems from this perspective. A detailed treatment of I/O systems from a discrete event perspective is given in Thomas Wittmann's Diploma Thesis, including how they relate to abstraction based controller design. A consise summary has been presented in [B3]. The remainder of the user reference is organized as follows:
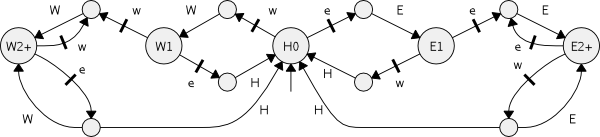
A Simple ExampleConsider a vehicle on a path that can be controlled by input events e to "move to the east" and w to "move to the west", respectively. A measurement facility distinguishes a home position and issues output events H for "home", E for "east of home" and W for "west of home". The dynamics of the vehicle are modelled by the below transition system, where we use an infinite state space to represent an unbounded path.
Plant L
We interpret the transition system w.r.t. the infinite time axis, i.e., as an omega-language L ⊆ Sigma^w. Since state enumeration is not feasible for an infinite state set, we can not directly apply enumaration based methods from supervisory control theory. Thus, we resort to a plant abstraction with a finite state set. The abstraction L' ⊆ Sigma^w, L ⊆ L', realized by the transition system below, has been obtained by merging all states east of position E1 and all states west of position W1.
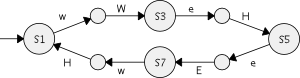
Abstraction L'
As a specification, we require the vehicle to regularly visit east and west positions. For sake of simplicity, we circumvent eventuality properties and use the more restrictive language inclusion specification E depicted below. We apply the synthesis procedure IoSynthesisClosed on the plant abstraction to obtain a controller such that K' := L'∩H ⊆ E. The procedure is essentially a wrapper for SupConComplete, i.e. output events are not disabled and any finite string can be further extended.
Clearly, the controller will also enforce the specification when applied to the actual plant L: K := L∩H ⊆ L'∩H ⊆ E
In general, the closed loop interconnection with the actual plant
may be blocking. However, for our plant at hand this is not the case.
Observe that, for our plant, input events from
U = {e, w} and
output events from
Y = {H, E, W} alternate,
and that the plant in every state will accept either none or any input event.
The latter property is referred to as a locally free input:
Literature[B1] J.C. Willems: Paradigms and Puzzles in the theory of dynamical systems, IEEE Transactions on Automatic Control, vol. 36, issue 3, pp. 258--294, 1991. [B2] T. Moor, J. Raisch: Supvervisory control of hybrid systems within a behavioural framework, Special issue on hybrid systems, System and Control Letters, vol. 38:3, pp. 157-166, 1999. [B3] T. Moor, K. Schmidt, Th. Wittmann: Abstraction-based control for not necessarily closed behaviours, Preprints of the 18th IFAC World Congress, pp. 6988-6993, 2011. libFAUDES 2.33h --- 2025.09.16 --- with "synthesis-omegaaut-observer-diagnosis-iosystem-hiosys-multitasking-coordinationcontrol-timed-iodevice-priorities-simulator-luabindings" |